중국산 FPV 카메라를 구입했습니다. 알리에서.
이유는 RC 카에서 1인칭 뷰로 운전을 해보고 싶었기 때문입니다.
과연 중국산 FPV 카메라는 쓸만할까요?
RC 카에서 일인칭 뷰로 운전하는건 기대했던 만큼 재미있는 경험이었을까요?
우선 알리에서 FPV camera 를 검색해보니 아주 많은 제품이 검색되었습니다. 저는 FPV 에 대해 잘 모르므로 일단 아래와 같이 full set 로 구성된 제품을 구입하기로 마음먹었습니다. 생각보다 가격도 많이 비싸지 않아 가벼운 마음으로 구입을 하였습니다.

구성품은
- 카메라
- 송신기
- 수신기겸 핸드폰 USB 영상 전송 장치
- OSD 조이스틱
- 카메라 고정용 부품
- 각종 연결 케이블
- 휴대폰 연결 케이블 (b type, c type)
요렇게 준비되어 있고요.
판매자의 영상을 보면 핸드폰 충전 단자에 케이블을 연결하면 카메라에서 전송하는 영상을 휴대폰으로 볼 수 있는 것 같았습니다.
저는 집에 싸구려 VR 고글이 있기 때문에 휴대폰으로 연결해서 카드보드 기능으로 보면 되겠다 싶었습니다.
일단 판매자의 글에서 본것 처럼 스펙은 7~24V 로 되어 있지만 12V 를 추천하였기에 12V 파워서플라이에 물려서 테스트 해보니 잘 동작하였습니다.
하지만 전 RC 카에서 사용할 것이므로 12V 파워 서플라이를 연결할 수 는 없으니 2S 1P 배터리를 연결해봅니다.
이론적으로 2S1P 배터리면 실제 RC 카 사용 전압을 고려했을 때 최소 7.2V ~ 8.4V 정도의 구간이 나오므로 7V~ 24V 제품 동작에 문제가 없다고 판단했습니다.
연결해보니 ...
안되네요.
신호가 잡히질 않습니다. 흠..
그럼 여기서 포기해야 할까요?
카메라를 위해 3S 배터리를 다시 만들어야 할지 고민되었습니다. 굴러다니는 18650 배터리가 몇개 있으니 3S 배터리를 만드는건 어려운 일은 아니었으나 카메라만을 위해 배터리를 장착하는건 좀 무리라는 생각이 드는 찰나!
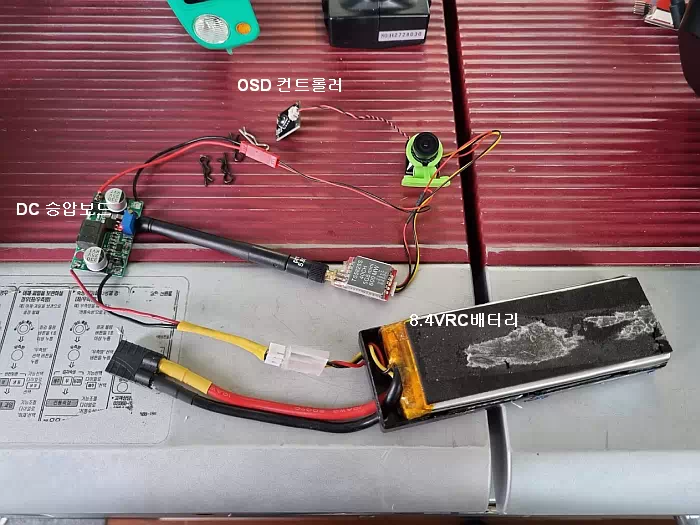
제 부품 꾸러미 중에 DC 승압보드가 있는게 생각났습니다.
오케이.
2S 배터리 (만충 시 8.4V)를 승압보드에 연결하고 승압 보드의 가변저항을 조절해서 약 13V 정도 출력이 되도록 조정한뒤 카메라에 연결을 해보았습니다.
굳!
잘 되네요.
일단 그럼 당장 밖으로 나가 봐야 겠죠?
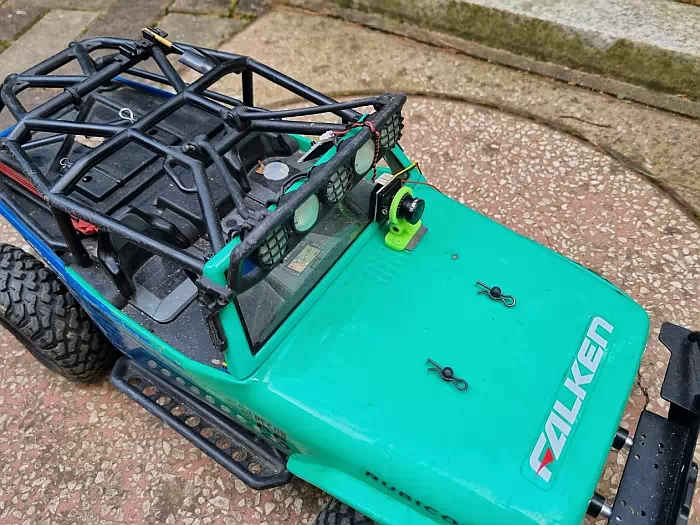


먼저 거북이 처럼 느릿느릿한 SCX10 에 장착해 보았습니다.
일단은 보닛 위에 카메라를 붙이고 핸드폰으로 보이는 화면을 조정한 뒤 주행을 해보았습니다.
흠 터레스팅...
괜찮은듯 괜찮지 않은 듯 묘한 느낌이네요.
기분이 좋은듯 나쁜,,, 똥을 누고 있는데 똥이 마려운 그런 느낌이랄까요?
일단은 화질이 생각보다 구립니다.
화질이 많이 구려서 직접 운전하는거랑은 차이가 많이 나네요.
화면도 너무 밝아서 조금만 밝은 곳으로 가도 뭐가 뭔지 구분이 잘 안되네요.
둘째는 카메라가 고정되어 있으니 엄청 답답합니다.
우리가 운전할 때 앞만 보고 운전하지 않는 것처럼 시야가 고정되어 있으니 매우 답답한 느낌입니다.
옆도 좀 보이고 하면 좋겠다는 생각이 들었고요.
셋째는 수신 거리가 상당히 짧습니다. 장애물만 있어도 화면이 금방 지직 거리고 나무나 바위 같은 장애물이 좀 있으면 50m 만 떨어져도 거의 운전이 불가능한 상황이었습니다.
이런..
판매자 글을 보니 제가 구입한 600mw 제품은 1km 이상까지도 신호가 간다고 써있는데 아마 수신기의 성능도 좋아야 하나 봅니다. 게다가 보통 드론용으로 사용되기 때문에 허공에 떠있는 드론에 비하면 지상에서 움직이는 RC 카는 상대적으로 장애물이 많을 수 밖에 없겠다는 생각이 들었습니다.
어쨌든 이런 불편함으로 인해 포기할 제가 아니지 않겠습니까?
우선은 모든 문제를 개선할수는 없을 것 같고요. 해볼 수 있는걸 해 봐야 겠습니다.
1. 화질 개선하기
- 카메라와 함께 배송된 OSD 스위치 인줄 알았던 초소형 조이스틱 보드가 있습니다. 어떻게 사용하는지 몰랐는데 그냥 카메라에 연결하고 버튼을 누르면 메뉴가 나타납니다.
여기서 색상, 밝기, 자동 밝기 조절 등 훌륭하지는 않지만 기본적인 화면 조절 기능을 이용하여 화면을 조절해 봅니다.
밝기와 화이트 밸런스도 고정으로 변경하였습니다.
2. 답답한 카메라의 시야각을 조정하기
- 카메라의 시야각을 바꾼다고요? 네 당연히 하드웨어를 변경하는건 논외 입니다. 그럼 어떻게 하는게 좋을까요?
저는 어짜피 VR 헤드셋을 사용할 것이기 때문에 헤드 트래킹을 사용해 보기로 하였습니다. 마치 제가 RC 카의 운전석에 앉아 있는 듯 제가 바라보는 방향으로 운전석의 카메라를 움직이는 것이죠.
과연 이게 가능할까요? 제가 할 수 있을까요?
어떤 원리로 동작을 시킬지 구상을 해 봅니다.
나 : VR 헤드셋 + mp6050 (지자기+기울기센서) + 아두이노 + nrf24L01 (무선 송수신기) / 영상수신기 + VR 헤드셋
자동차 : nrf24l01 (무선 송수신기) + 아두이노 + x,y축 서보모터 + 카메라 + 영상 송신기
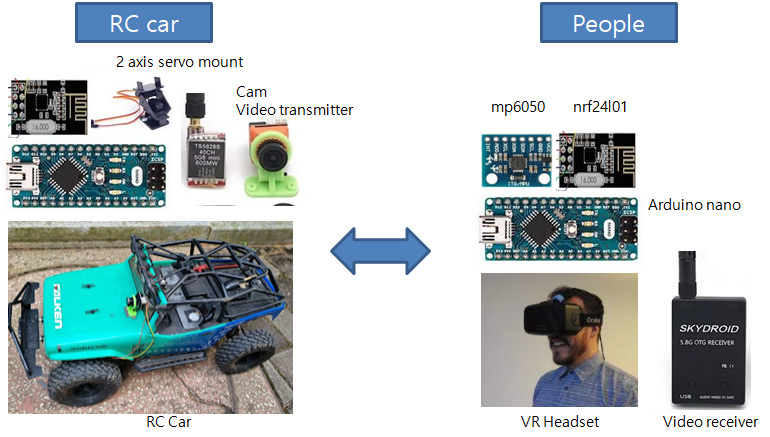
위와 같은 부품을 통하여 가능할 것 같지 않습니까?
VR 헤드셋은 항상 제 머리에 부착되어 있는 상태로 머리의 회전각도를 구할 수 있을 것이고 이를 이용하여 아두이노에서 nrf24l01 과 같은 무선 송신기를 통하여 현재 제 머리의 방향을 송출하게 됩니다. 그럼 송출된 신호를 RC 카에 있는 아두이노와 nrf24l01 을 이용하여 수신한 뒤 수신한 각도를 이용하여 케메라를 부착하고 있는 서보 모터를 움직이는 것이죠.
생각보다 간단한 개념이죠? 안 간단하다고요?
자 그럼 이제 슬슬 구현을 해보기로 하겠습니다.
한스텝 한스텝 따라오실 수 있도록 한번 포스팅을 해보도록 하겠습니다.
다음 포스트를 기대해 주세요~
1단계 : 2축 제어 서보모터 마운트 만들기
2022.01.31 - [DIY/Arduino] - [아두이노]2축 서보모터 초간단 제어하기, 간단한 프레임 제작까지
[아두이노]2축 서보모터 초간단 제어하기, 간단한 프레임 제작까지
뭔가 목표가 생기면 과정이 분명해 진다. RC 카에 헤드트래킹을 이용한 FPV 를 구현하려는 목표가 생기고나니 과정을 잘 정리하는게 필요하겠다 싶어 포스트를 남깁니다. 우선 첫번째 스텝으로 2
diy-dev-design.tistory.com
2단계 : mpu6050 자이로 센서를 이용하여 2축 서보모터 제어하기
2022.01.31 - [DIY/Arduino] - [아두이노]mpu6050 을 이용하여 2축 서보모터 제어하기
[아두이노]mpu6050 을 이용하여 2축 서보모터 제어하기
아두이노와 같은 마이크로 칩을 이용하여 무엇인가를 해보다 보면 정말 놀라운 경험들을 많이 하게 됩니다. 그 중 하나가 바로 mpu6050 같은 센서가 될 수 있겠습니다. 요 조그만 칩을 이용하여 기
diy-dev-design.tistory.com
3단계 : nrf24l01 과 mpu6050 을 이용하여 무선으로 헤드트래킹 정보 송신하기
2022.01.31 - [DIY/Arduino] - [아두이노]NRF24L01을 이용하여 무선으로 mpu6050 신호 전달하기
[아두이노]NRF24L01을 이용하여 무선으로 mpu6050 신호 전달하기
자 어느새 목표했던 RC headtracking FPV 만들기의 종착역을 다가가고 있습니다. 앞서 소개해 드렸던 2축 서보마운트 제작 및 서보컨트롤과 mpu6050 을 이용하여 2축 서보모터를 제어하는 내용은 잘 보
diy-dev-design.tistory.com
4단계 : RC 차량 조종석에 헤드트래킹 카메라 설치하기
기대해 주세요~
'DIY > RC' 카테고리의 다른 글
| 20년된 엔진 RC 카 전동화 해보자 [kyosho inferno] (0) | 2022.01.25 |
|---|---|
| RGT Adventure 1/24 테스트 드라이빙 (암벽타기 성능) (0) | 2020.12.15 |
| 1/24 완벽한 RC 카 RGT ADVENTURE (2) | 2020.11.29 |
| [대륙의실수] 가성비 RC 카 HS18301, 안쪽까지 상세 보기, 4만원의 행복 (7) | 2020.04.16 |
| Storm Thunder (HS 18311) RC car manual - PDF (0) | 2019.12.31 |